7. Input & Output device¶
This week we worked on input and output devices, connected to Arduino Nano 33 Ble microcontroller.

General information¶
An input device is something you connect to a computer that sends information into the computer. An output device is something you connect to a computer that has information sent to it.
Input¶
Input devices are used to allow us to enter information into a computer system. This might be, for example, to control a character in a game, click on a shortcut icon on your desktop, or type data into a spreadsheet. To test this, we tried to use the microcontroller to sense temperature and connected it to the computer to read the results.
Reading temperature¶
Steps¶
Opened a new page in Arduino
Then I had to copy the HTS221 library link from Arduino website to download it

Opened Sketch > Include library > Manage libraries
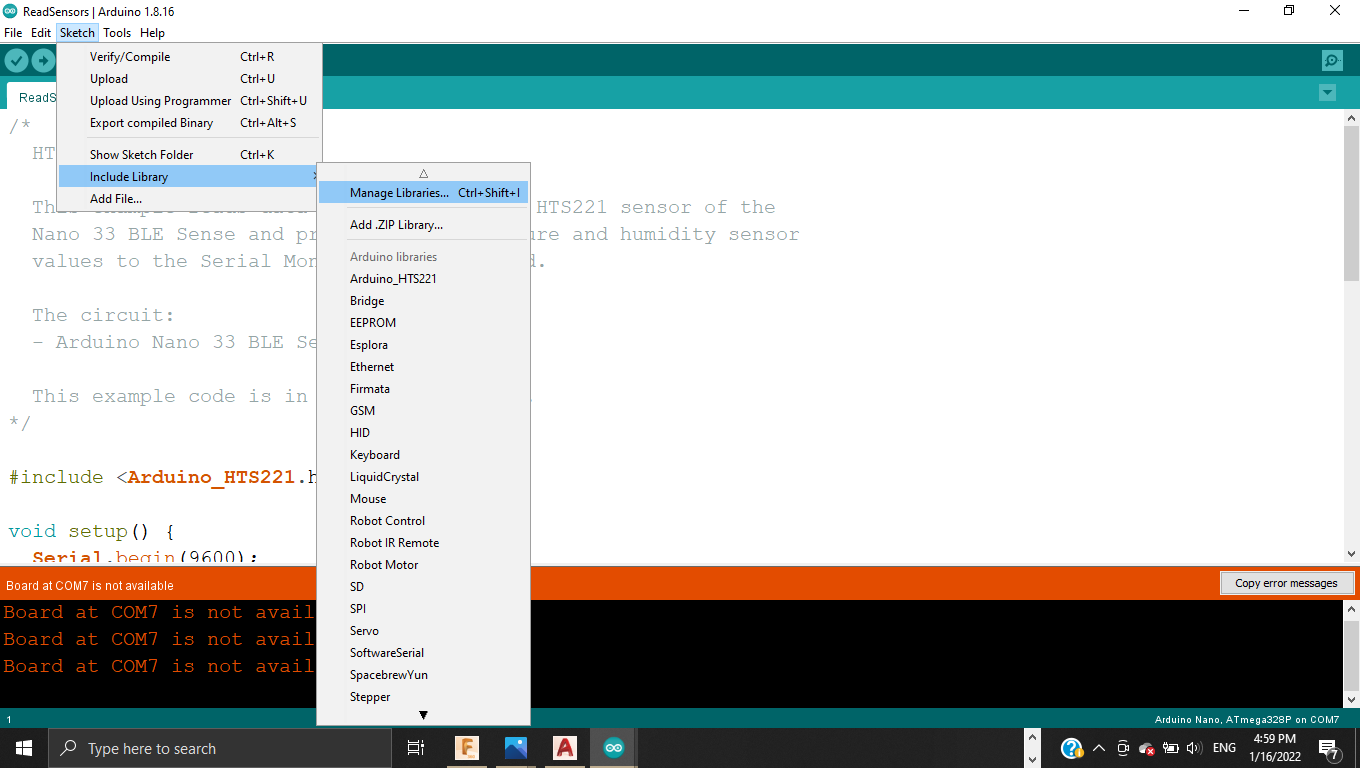
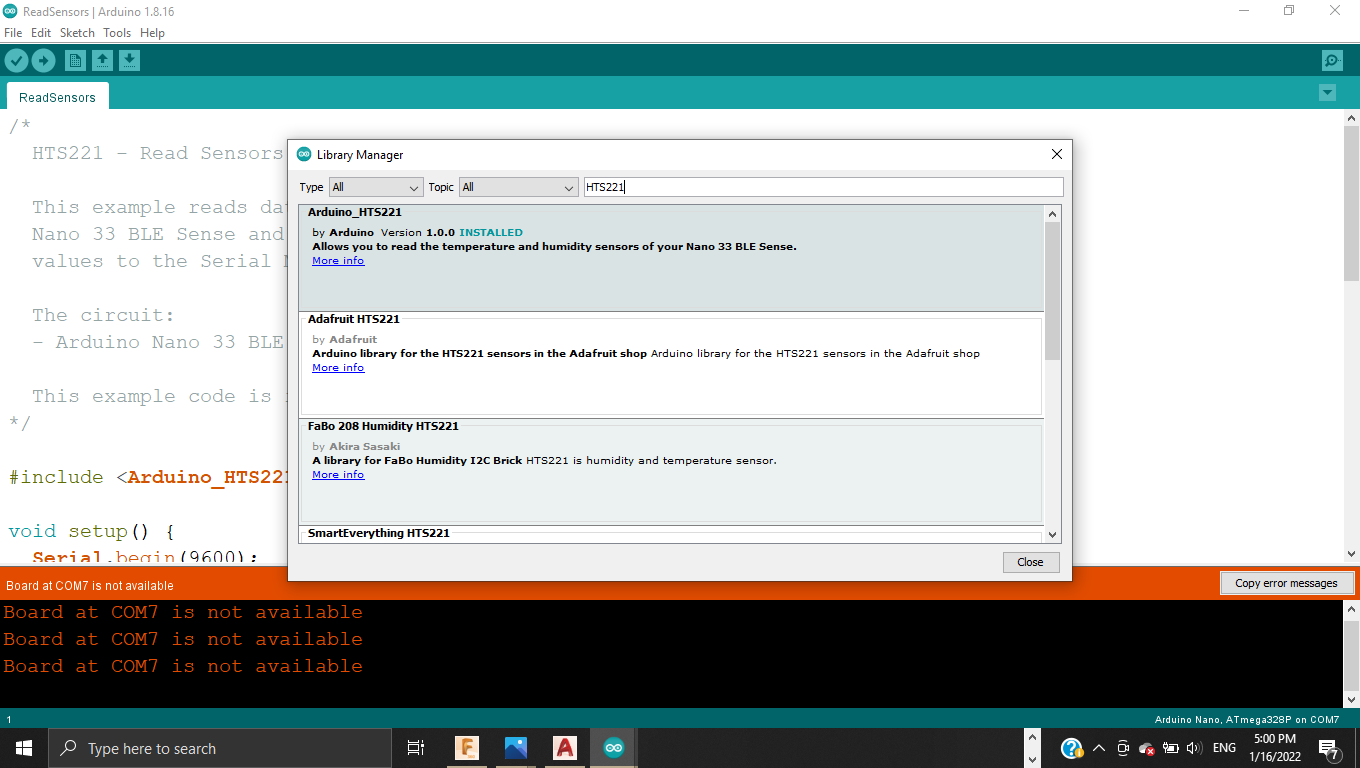
Pasted the link and installed the HTS221 library which is made to read temperature and humidity sensors of Nano 33 BLE sense.
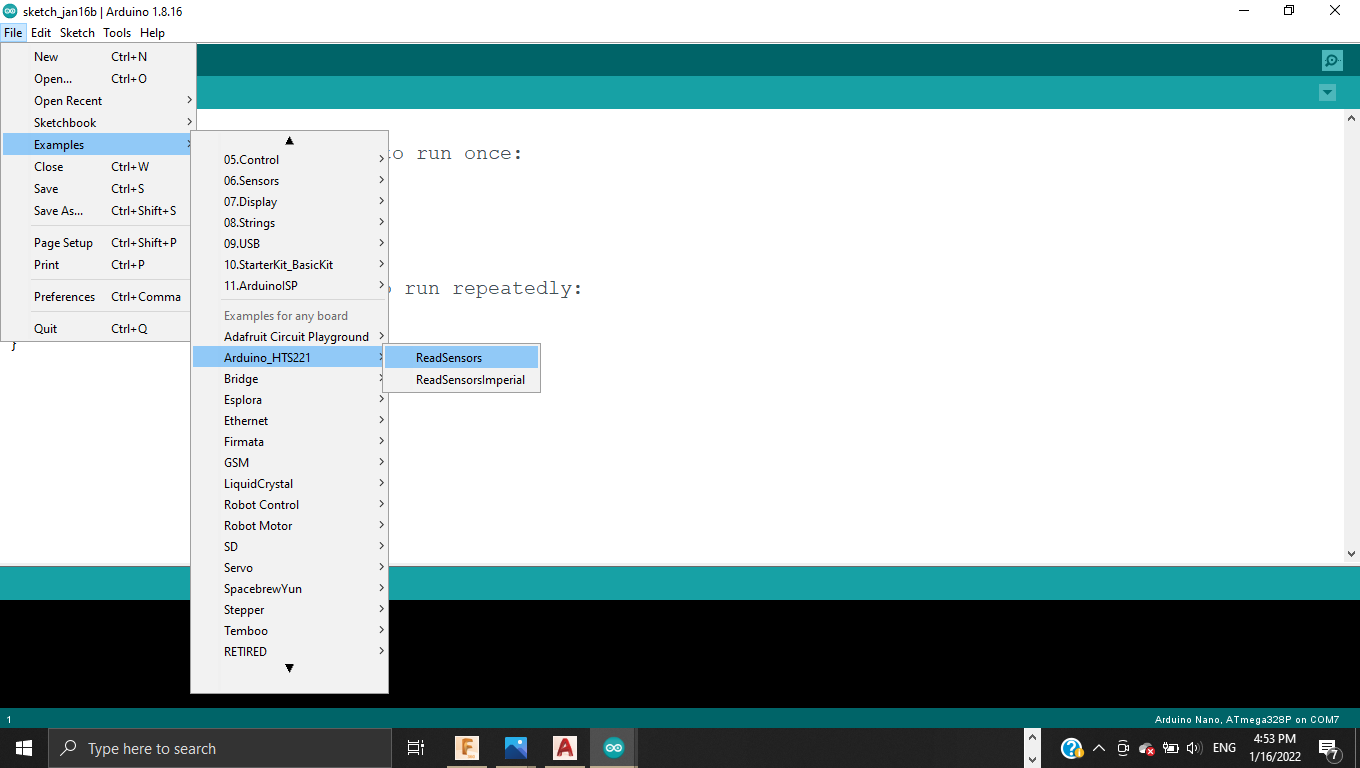
Now we can find the read sensors code with the examples
Code¶
/*
HTS221 - Read Sensors
This example reads data from the on-board HTS221 sensor of the
Nano 33 BLE Sense and prints the temperature and humidity sensor
values to the Serial Monitor once a second.
The circuit:
-Arduino Nano 33 BLE Sense
This example code is in the public domain.
*/
#include <Arduino_HTS221.h>
void setup() {
Serial.begin(9600);
while (!Serial);
if (!HTS.begin()) {
Serial.println("Failed to
initialize humidity
temperature sensor!");
while (1);
}
}
void loop() {
// read all the sensor values
float temperature =
HTS.readTemperature();
float humidity =
HTS.readHumidity();
// print each of the sensor values
Serial.print("Temperature = ");
Serial.print(temperature);
Serial.println(" °C");
Serial.print("Humidity = ");
Serial.print(humidity);
Serial.println(" %");
// print an empty line
Serial.println();
// wait 1 second to print again
delay(1000);
}
Results¶
To read the results, I uploaded the code and opened the serial monitor from tools section.
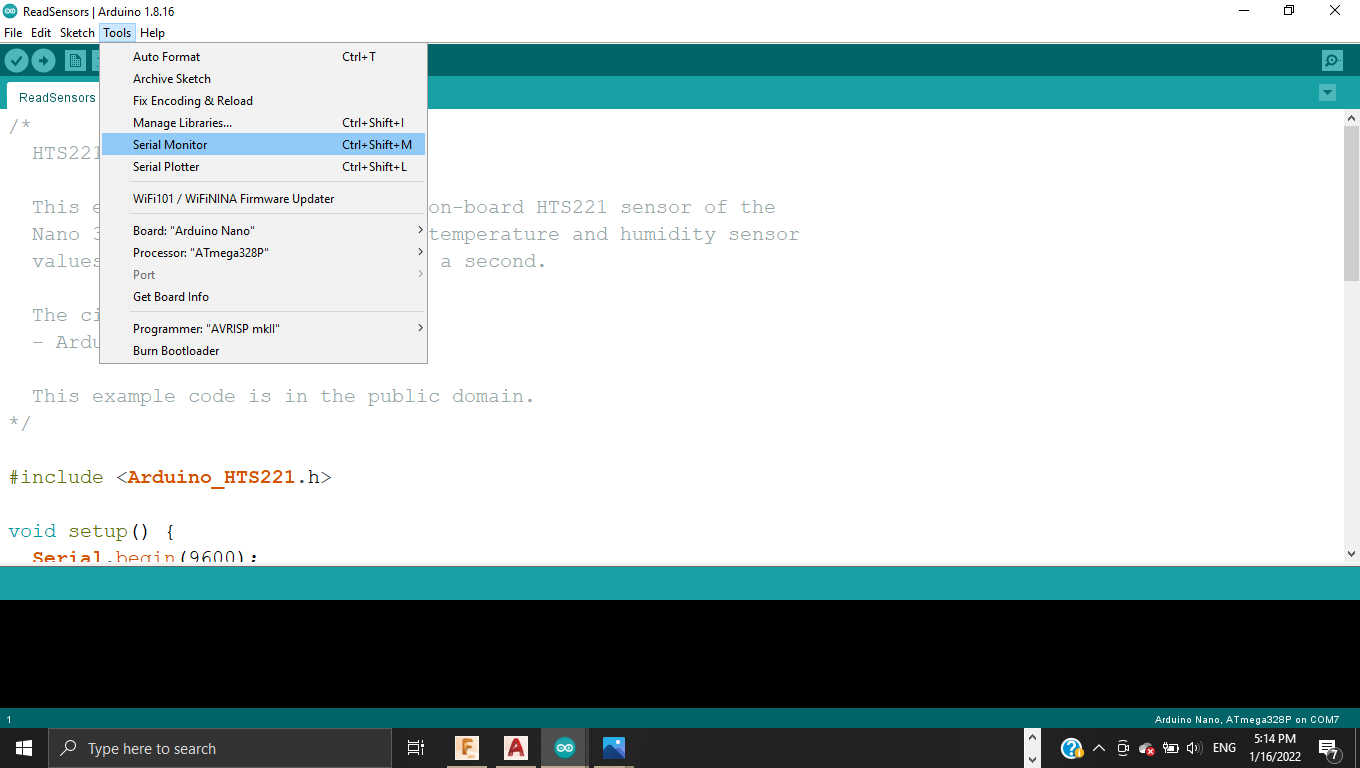
The serial monitor window appeared showing the temperature of the room

To test the change of temperature, I decided to increase it by holding the microcontroller
Now we can notice the increasement of temperature appearing in the window

Output¶
Output devices provide data in myriad different forms, some of which include audio, visual, and hard copy media. The devices are usually used for display, projection, or for physical reproduction. Monitors and printers are two of the most commonly-known output devices used with a computer. To test this device I chose the servo.
Servo motor¶

Servo motors or “servos”, as they are known, are electronic devices and rotary or linear actuators that rotate and push parts of a machine with precision. Servos are mainly used on angular or linear position and for specific velocity, and acceleration. This time we needed to connect the servo motor with the micro controller by jumper wires.
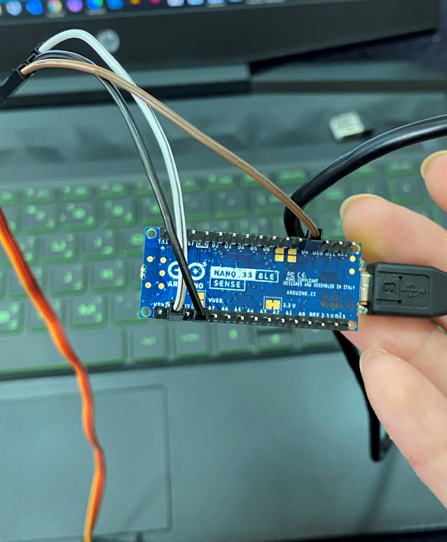
CONNECTIONS:
-
Ground to ground
-
Power to Vin
-
Digital to D6
Steps¶
Went to Examples > Servo > Sweep
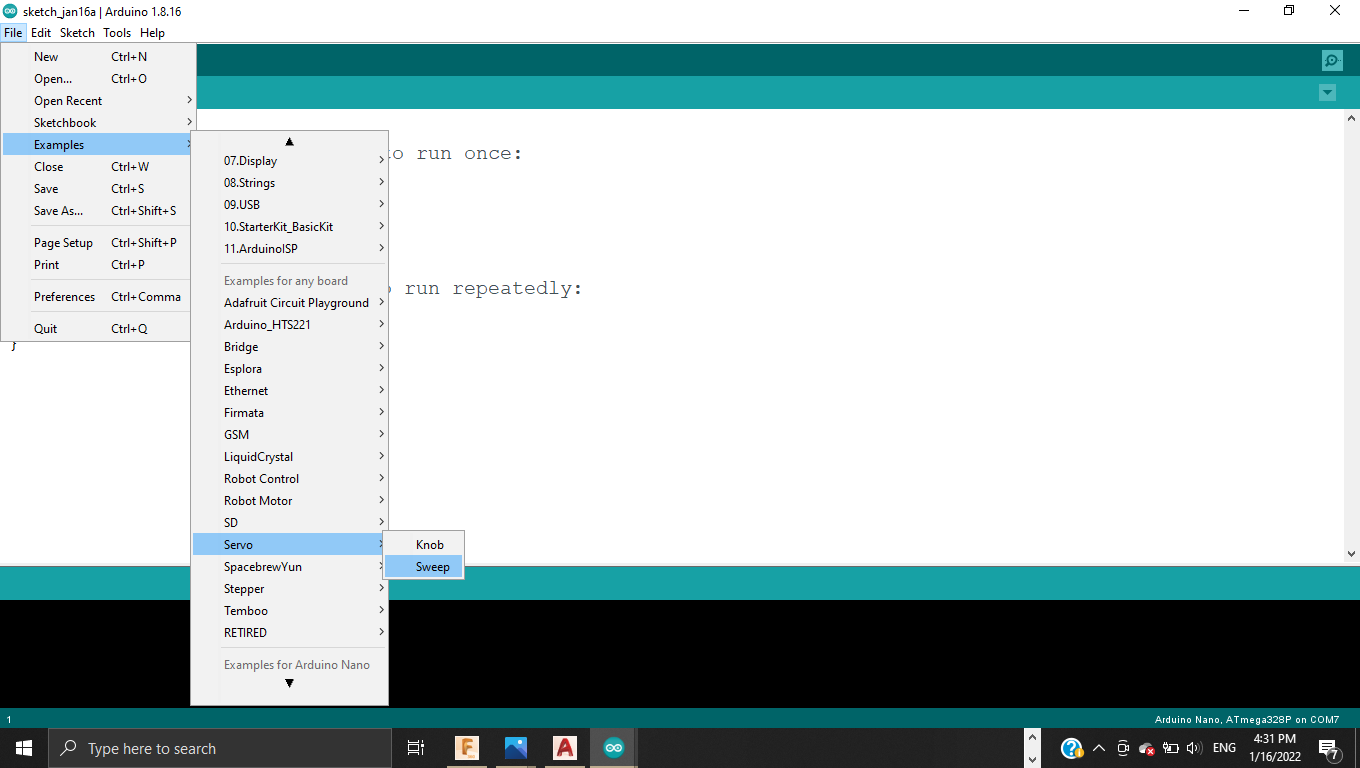
The servo code appeared
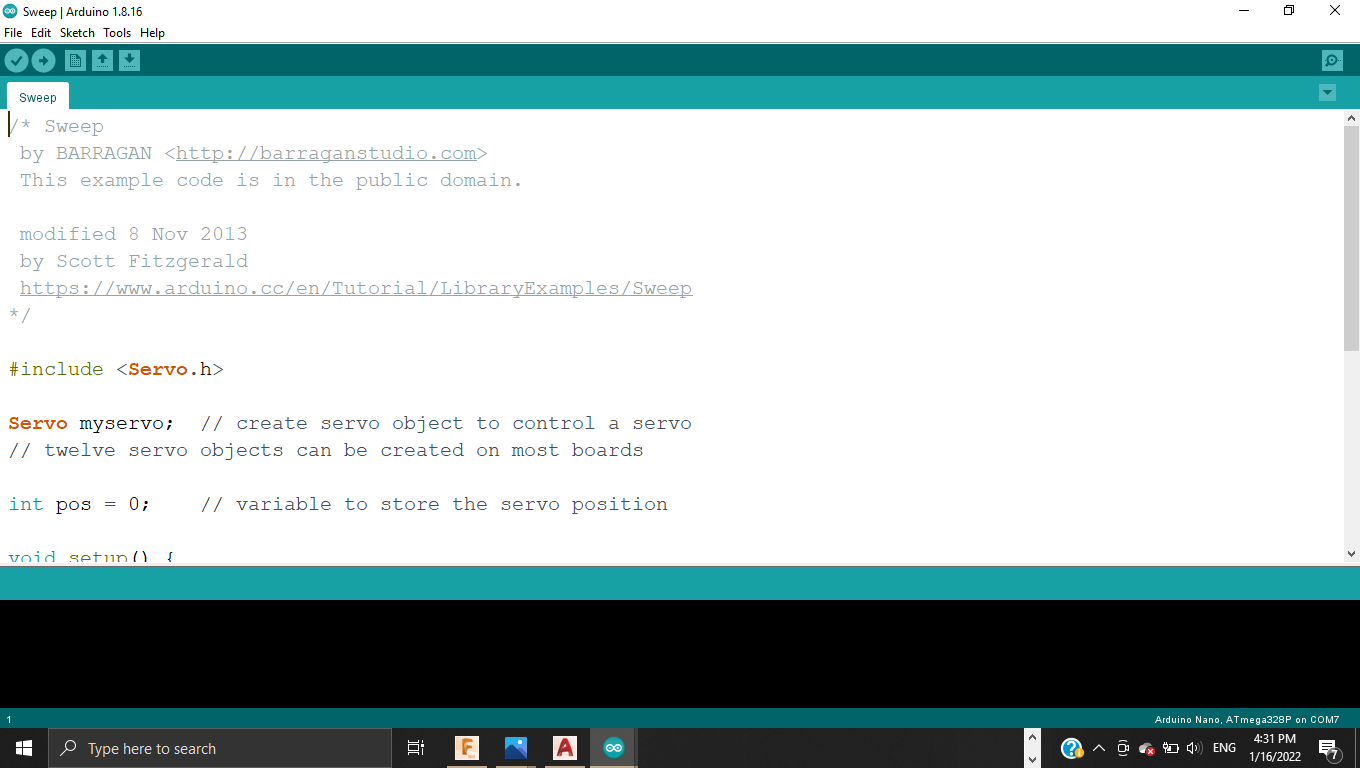
Changed pos to the value of 180 which is the maximum movement degree for this servo and changed the delay to 1000

Code¶
#include <Servo.h>
Servo myservo; // create servo
object to control a servo
// twelve servo objects can be
created on most boards
int pos = 0; // variable to
store the servo position
void setup() {
myservo.attach(6); // attaches
the servo on pin 6 to the
servo object
}
void loop() {
for (pos = 0; pos <= 180; pos
+= 1) { // goes from 0
degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos);
// tell servo to go to
position in variable
'pos'
delay(1000);
// waits 15 ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos
-= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos);
// tell servo to go to position in variable 'pos'
delay(0);
// waits 15 ms for the servo to reach the position
}
}
Results¶
Connected the microcontroller to computer and uploaded the code, and now we can see the servo moving to 180 degrees
Input and Output¶
Ultrasonic sensor and Servo¶
For last task, we were asked to merge between the two devices (input & output). I chose Ultrasonic sensor and servo because they are the two I need for my final project.
I found this useful video on YouTube and followed its steps
Needs and connections¶
- Microcontroller
- Ultrasonic sensor
- Servo motor
- Jumper wires
And this diagram below shows how everything is connected

Code¶
#include <Servo.h>
Servo servo1;
int trigPin = 9;
int echoPin = 8;
long distance;
long duration;
void setup()
{
servo1.attach(7);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);// put
your setup code here, to run once:
}
void loop()
{
ultra_sonic();
servo1.write(90);
if(distance <=9)
{
servo1.write(270);
}
}
void ultra_sonic()
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin,
HIGH);
distance = duration*0.034/2;
}